正確さが求められる“アベレージラリー”、有川和正/藤嶋義孝組が2連勝!
2021年6月22日

JMRC近畿アベレージラリーシリーズは2020年は全6戦が予定されていたが、新型コロナウイルス感染症の感染拡大の観点からすべて中止となった。だが、2021年は4月25日に兵庫県宍粟市にて第1戦が開催され、6月6日には感染対策を実施して京都府南丹市にて第2戦も開催された。
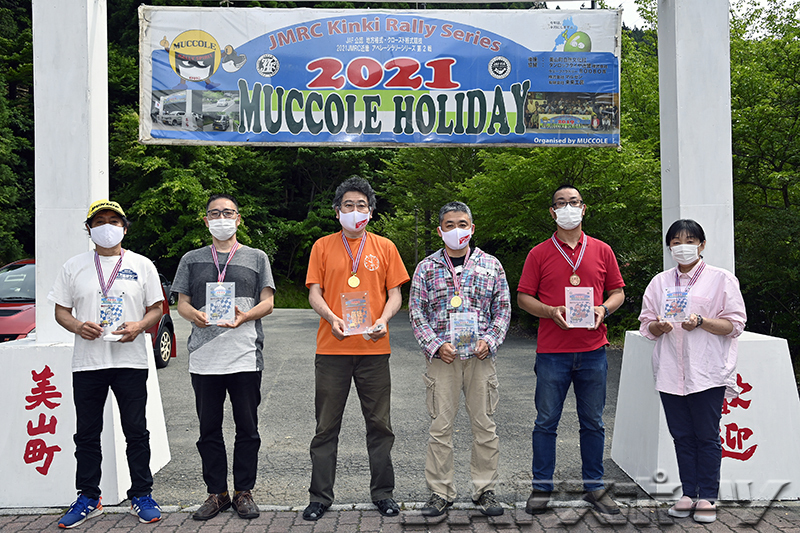
JMRC近畿アベレージラリーシリーズ第2戦「MUCCOLE HOLIDAY 2021」
開催日:2021年6月6日
開催地:京都
主催:MUCCOLE
第2戦の舞台となったのは京都府南丹市美山町。かやぶき集落の里としても有名で、近年では観光地として訪れる人も増えている。そんな美山町はかつて全日本選手権「ラリーオブ京都」や地方選手権の「ザ・京都ラリー」のホストタウンとして使用されたこともあり、ラリーには理解のある町である。
ここ最近では、制限速度以下で走行して時間の正確さを競うアベレージラリーが開催されているが、風光明媚な景色を楽しむことを考えれば、この町にとってアベレージラリーの方が向いているのかもしれない。だがそんなのんびりした雰囲気とは裏腹に、エントラント15台31人はスタート前からピリピリした雰囲気が漂っていた。
今回の設定は至って簡単で、コマ地図に出てくる目標物のPC(パスコントロールポイント)で、走行する速度を指定された速度に変更するだけのシンプルな競技だ。しかしそれがなかなかうまいこと行かないから、アベレージラリーは興味深い競技でもある。

1CP(チェックポイント)では11台が誤差1秒以内の走行を果たすも、それ以降は徐々に大量減点を受けるクルーが増えてくる。前戦で2位に入っている石田芳道/春木正一組は、6CPで51秒の誤差から下位に転落して最終的に9位となり、「途中に時間走行があり、そこまでは問題なかったはず。まわりのクルーとも合っていたので。時間走行のあとに何か入力間違いしたのかな? どうしてこうなったのか教えてほしいぐらいです」と悔しがっていた。
また、5位になった松浦秀勝/小川博史組が一番悔しそうにしていた。3CPで18秒の減点で、「タラレバですが、これがなかったら優勝に匹敵していたはず。そういうのがアベレージラリーですね。PC看板をこの辺かなと思っていたのに見落としました。リカバリーしようと思ったけれど、取り戻すことはできませんでした」と落ち込んでいた。
そんなアベレージラリーだが、最少減点でトータル誤差7秒でゴールしたのは、前戦の覇者である有川和正/藤嶋義孝組と荒井重信/上垣秋広組。規定により誤差0の数で有川/藤嶋選手組が優勝し、このシリーズ2連勝を飾った。
「ドライバーの走り方と計測車の走り方がうまく合っていました。4CP手前ではPCを見落としましたが、あの辺かなと誤差1秒でOKでした。前回の優勝はまわりが脱落して助けられたラッキーな優勝でしたが、今回は実力でもぎ取った感じの優勝で嬉しいです」と一昨年のシリーズチャンピオンが2連勝。昨年はシリーズが開催されなかっただけに二期連続チャンピオンに向け大きな優勝となった。
一方2位となった荒井/上垣組は「最終CPでの申告で補正を入れずに勝負したのが敗因です。距離が合ったり合わなかったりして、少しの誤差で補正を入れる勇気がありませんでした」と悔しさを表していた。
3位は誤差10秒の松井弘成/信田由美組が入賞し、「まんべんなく減点をもらいました。後半に頑張ろうとしたら前ゼッケンのクルマに追いついて、どちらが間違っているんだろうって不安になりましたが、自分を信じて行ったら間違ってなくて良かった。今回も可もなく不可もなくツメが甘かったのかな。前回3位だったので、もう一つ上には行きたかったです」と連続3位を悔やんでいた。
4位は出雲市から遠征の杉谷仁/佐柳陽組で「ミスコースしたけれど細い道をバックで戻り、何とかリカバリーできたので良かったです」とこちらは笑顔だった。
「初めて組んだ還暦コンビ。60だから6位かな。6位でも嬉しいです」と笑顔が絶えなかったのは、ヴィッツを駆る笹本力也/吉廣雅人組。
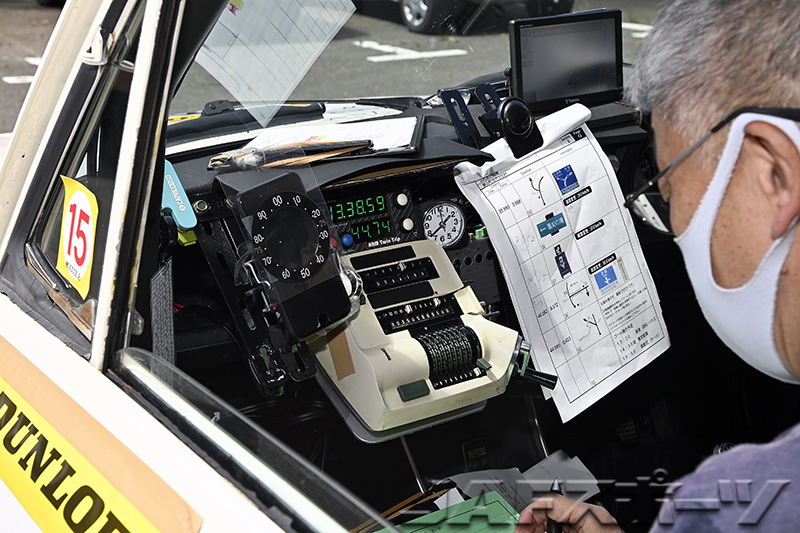
クローズドクラスでは3名乗車の檜垣智也/萩野司/相原真弓組が、仲良二/益田豊組スバルFF1を下しての勝利となり、「前回の反省点を改善して満足しています。でも総合クラスとはまだまだ差があるので……」と更なる上を見ていた。ちなみに2位の仲/益田組は昔ながらの計算機でのラリーに、60歳以上のオフィシャルが妙に感動していたのが印象的だった。





■“アベレージラリー”とは?
今回レポートしたJMRC近畿アベレージラリーシリーズは、JAFが定めた「第1種アベレージラリー開催規定」に沿って行われるJAF公認のラリー競技だ。このアベレージラリーとは、全日本ラリー選手権のように、閉鎖された道での速さを競うSS(スペシャルステージラリー)とは異なる「時間の正確さ」を競うラリー。
参加者は、指定されたルートを指示された平均速度(アベレージ)を維持しながらトレースする。そしてルート上に複数設定されたCP(チェックポイント)を通過した自車の時間を、主催者があらかじめ設定した通過時間との差を成績の判断基準としている。
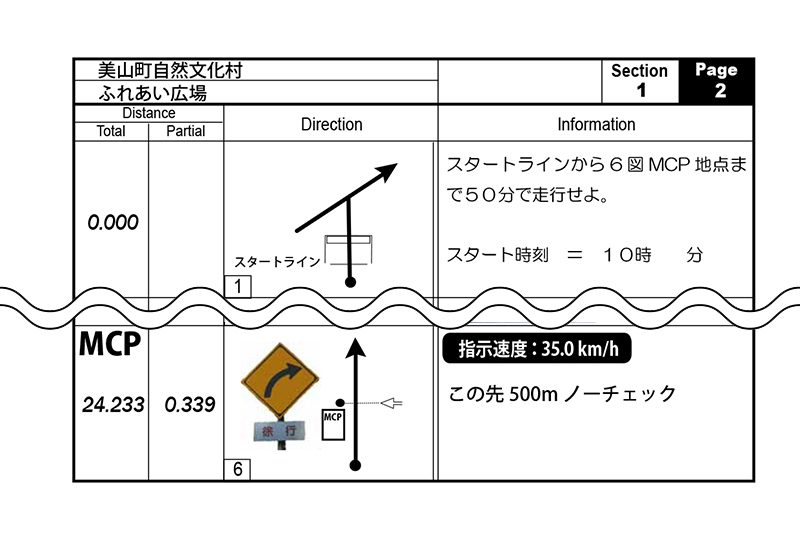
主催者から渡されるコマ地図と呼ばれるロードブックに従って、公道上のルートを進むという点はSSラリーと同じだが、アベレージラリーでは指示書というものが渡され、ルートの中にあるPC(パスコントロールポイント、通称パスコン)ごとに指示される速度(例:「このコマ地図地点から35km/hで走行」 ※指示される速度はすべて法定速度内)に従って進む。そして指示速度通りに走れているかをCP(チェックポイント)で採点するという形になっている。
この指示書やコマ地図は、主催者の車両が計測したデータをもとに作成されるが、その車両と参加者の車両は同じでないため、当然、計測する距離にズレが生まれる。そこで主催者の車両に合わせた自車の補正が必要となるわけだが、コマ地図には区間距離が書かれている場合が多いので、参加者はその距離と自車の距離を比べて誤差を確認して補正を入れるようにしている。アベレージラリーでは、その誤差を確認するためのOMCP(オドメーターコントロールポイント=OD、MCPなど)がスタート直後に置かれるので、そこで参加者はどの程度の補正をしたらいいかを知ることができるというわけだ。
そしてPCの場所は参加者にあらかじめ通知されるが、CPの場所は事前に通知されない(隠されている)。そのため、参加者はいつCPが現れてもいいように、与えられた指示速度を正確にキープすることが求められるのだが、道の形状、勾配は一定ではないので、これがなかなか難しい。ちなみに、このような走行を「リライアビリティ・ラン」と呼んでいる。
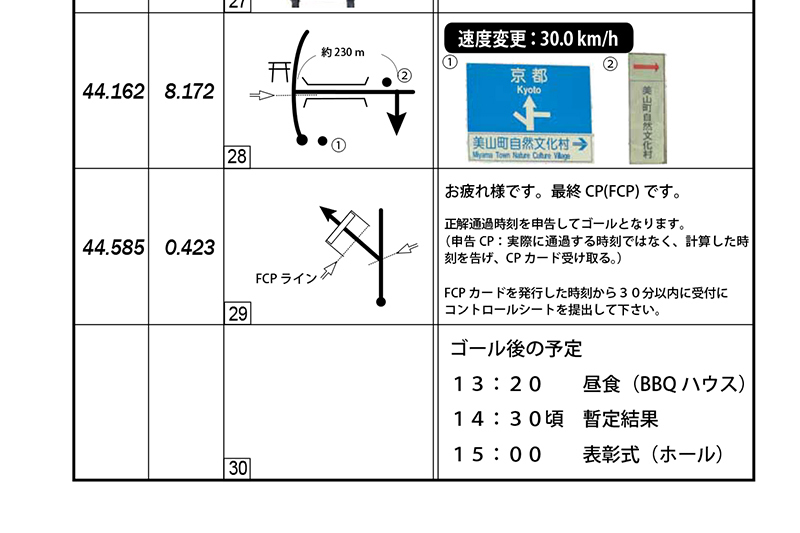
また、上記レポートの中に出てくる時間走行区間だが、これは国道等、交通量が多く、信号がルート上にある場合などに用いられる手法で、その区間は交通の流れに乗って走行するようにされている。そして国道等から外れて、アベレージ走行がある程度可能になる区間から、時間調整の後に再スタートをする区間のことを言う。
アベレージラリーは、ルート上に何か所か設定されるCPでの採点の合計で順位を競うが、CPの中には申告CPというものがあり、これは自分の車両がCPを通過した時間ではなく、自分が正解と思う通過時間を予想して申告できるというもので、ゴールとなる最終のCPに置かれることが多い。レポートの中に「申告CPで補正しなかった」というコメントがあるが、これは自分の車両の通過時間が正解だと思ったのでそのままのタイムを申告した、という意味になる。
このようにアベレージラリーはスピードを競わないので、オートテストのようにサンデードライブの感覚で参加できる競技だ。近畿地区で開催されているアベレージラリーシリーズではヘルメットは不要、まったく改造されていないノーマルのクルマで参加できる。時間の正確さを争うのでドライブテクニックはさほど必要なく、気軽に楽しめるモータースポーツなのだ。

フォト/山口貴利 レポート/山口貴利、JAFスポーツ編集部



